Abstract
An accurate and uncertainty-aware 3D human body pose estimation is key to enabling truly safe but efficient human-robot interactions. Current uncertainty-aware methods in 3D human pose estimation are limited to predicting the uncertainty of the body posture, while effectively neglecting the body shape and root pose.
In this work, we present GloPro, which to the best of our knowledge the first framework to predict an uncertainty distribution of a 3D body mesh including its shape, pose, and root pose, by efficiently fusing visual clues with a learned motion model. We demonstrate that it vastly outperforms state-of-the-art methods in terms of human trajectory accuracy in a world coordinate system (even in the presence of severe occlusions), yields consistent uncertainty distributions, and can run in real-time.
Method
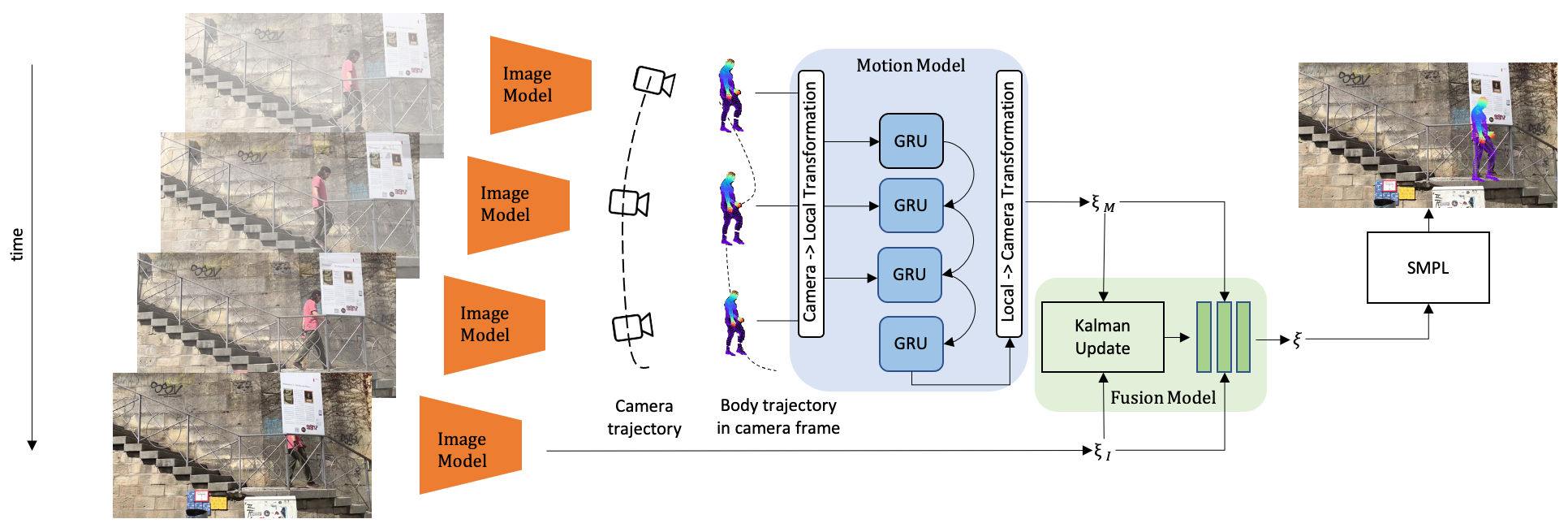
Our model predicts an image-based prior and a motion-based prior and fuses them to a posterior distribution over the SMPL parameters afterward. Thereby, given the camera trajectory, the body motion can be estimated independently from the camera motion. The body state distribution can then be propagated to an uncertainty distribution over each vertex of the 3D body mesh.
Qualitative Results

Qualitative comparison of the human body tracking with VIBE (upper) and our method (lower) in the presence of severe occlusions. Our method yields a body state distribution with a stable body posture and root pose prediction, as well as a reasonable uncertainty in the occluded areas while tracking the body over the whole sequence. Meanwhile, VIBE only predicts a deterministic human body mesh, loses track under occlusion and consequently estimates a wrong body posture..